
五通桥区叉车配件
五通桥区叉车配件
叉车配件的选购技巧,让你远离那些坑!

1、看叉车配件的零件号及规格是否合适
大部分的叉车配件都有一个特定的零件号和技术参数。如选购电气系统配件时,应注意检查与被换配件的电压、功率是否一致;选购叉车发动机传动皮带时,应注意型号和长度宽度。
2、看外包装的商标标识是否齐全
质优的叉车配件的外包装质量相对较好,且包装盒上字迹清晰,套印色彩鲜明。一些重要部件如发电机、起动机、液压泵等,还配有使用说明书、合格证和检验员章,以指导用户正确使用维护保养方法。因此在选购时应仔细认清,以防买了假冒伪劣的叉车配件。

3、看叉车配件的外形及尺寸有无变形
有些叉车配件因厂商制造、物流运输、存放不当,易产生变形。检查时,可将轴类零件沿玻璃板滚动一圈,看零件与玻璃板贴合处有无漏光来判断是否弯曲;选购叉车离合器从动盘钢片或叉车摩擦片时,可将钢片、摩擦片举在眼前观察其是否有翘曲;在选购叉车油封等密封件时,带骨架的油封端面应呈正圆形,能与平板玻璃贴合无翘曲;无骨架油封外缘应端正,用手握使其变形,松手后应能恢复原状。在选购各类衬垫时,也应注意用专业的量具检查配件的几何尺寸及形状。
4、看叉车配件的结合部位是否平整
叉车配件在搬运、存放过程中,或者会因为震动、颠簸,常会在结合部位产生毛刺、压痕、破损或出现裂纹,以影响叉车配件的安装使用。这一点在选购时或验货时应注意检查。
5、看叉车配件表面有无锈蚀
合格的配件表面,既有一定的精度又有铮亮的光洁度,越是重要的零配件,精度越高,且包装防锈防腐越严格。选购或验货时应注意检查,若发现配件有锈蚀斑点、霉变斑点、橡胶件龟裂、失去弹性,或轴颈表面有明显车刀纹路,应予以调换处理。

6、看叉车配件防护表层是否完好
大多数配件在出厂时都涂有防护层。如活塞销、轴瓦一般是用石蜡保护而叉车的活塞环、缸套表面涂防锈油并用包装纸包裹。叉车发动机配件的气门、活塞等浸防锈油后用密封的塑料袋封装。选购时若发现密封袋密封套破损、包装纸丢失,防锈油或石蜡流失,应予以退或换货。
7、看胶接配件有无松动
在检查由两个或两个以上零配件组合成的叉车配件,配件之间是通过压装、胶接或焊接而加工成型的,配件之间不允许有任何松动现象,如叉车油泵柱塞与调节臂是通过压装组合的;叉车离合器压盘与离合器片是铆接结合的,叉车摩擦片与钢片是铆接或胶接的;各种滤芯的滤芯骨架与过滤纸是胶接而成的;电气设备的电路电线头是焊接而成的。选购时若发现有松动,应予以调换。
8、看转动配件是否灵活
在选购叉车机油泵等转动部件总成时,用手转动泵轴,应感到灵活且无卡滞;选购滚针轴承时,一手支撑轴承内环,另一手打转外环,外环应能快速自如转动,然后逐渐停转。若转动部件转动不灵,说明内部锈蚀或外形已经发生变形,将会影响使用的,应予以退或换货。

9、看各总成配件有无缺件
质优的叉车总成部件如叉车变速箱系统的离合器或变速器总成,总成内所配备的零配件必须齐全完好,才能保证该总成能顺利装配和正常运行。一些总成部件上的个别小零件若漏装,将使总成部件无法工作甚至报废。
10、看叉车配件的装配记号是否清晰
为保证其它配合件的装配关系符合技术要求,在一些零件(如正时齿轮)表面刻有装配记号。若无记号或记号模糊无法辨认,将给装配工作带来很大困难,甚至直接装错。
11、看配合表面有无磨损
若配件的配合表面有磨损痕迹,或有涂抹油漆的配件拨开表面的油漆后发现旧漆,则多为废旧拆车件伪装,这时可直接要求退换。
12、看叉车配件的表面硬度是否达标
各配合件表面硬度都有规定的要求,在确定购买并与商家商妥后,可用钢锯条的断茬去试划,划时打滑无划痕的,说明硬度高;划后稍有浅痕的硬度较高;划后有明显痕迹的,说明硬度低,但需要注意的是在试划时不要损伤配件的工作面。


德国:移动式自主除草机器人无需化学品即可清除杂草
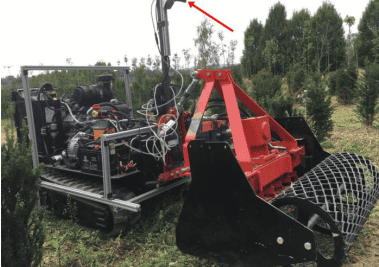
安装在AMU-Bot上的LiDAR扫描仪(红色箭头)在车辆移动时持续发射激光脉冲,系统利用这些脉冲来确定作物行的位置。图片来源:德国联邦农业和食品局/Fraunhofer
杂草是树木苗圃、菜园或果园中的一个真正的麻烦。清除杂草是一个非常相关的话题,也是一个相当复杂的话题。特别是在作物生长的早期阶段,杂草与作物争夺光照、水和养分。通过人工锄草来清除是劳动密集型的,而且使用有害的除草剂是不可取的,因为它们会污染环境。
现在,位于德国斯图加特的弗劳恩霍夫制造工程和自动化IPA研究所与合作伙伴合作,开发了一个移动式AMU-Bot机器人系统,能够以成本效益和环保的方式可靠地清除杂草。自主的履带式车辆AMU-Bot(”AMU “在德语中是 “自主机械除草 “的简称)在苗圃的树木行间行驶,使用旋转耙清除杂草。旋转的刀片连接到一个可调节高度的操纵器上。在一排树的末端,AMU-Bot车转过身来,自主地开始下一排的工作。

自主AMU-Bot在树木苗圃的各行之间行驶并清除任何杂草。图片来源:德国联邦农业和食品局/Fraunhofer
该机器人使用传感器进行导航,以机械方式清除杂草,而不需要使用化学品。安装在除草机上的LiDAR(光探测和测距)扫描仪在车辆移动时不断发射激光脉冲,然后被周围区域的物体反射。这就产生了环境的三维点云,帮助移动除草机找到方向并确定植物或树木的位置。团队负责人Kevin Bregler说:”AMU-Bot还不能对所有植物进行分类;但是,它可以识别树木苗圃栽培的行中的树木和灌木等作物。”
植物或树木之间空隙中的杂草也被可靠地消除了。为了做到这一点,机械手移动到作物之间的空隙。这些杂草不需要单独收集,而是留在地面上晾干。由于采用了履带式驱动,自驾车除草机可以轻松地沿着地面移动,而且非常稳定。即使是清除树苗时产生的地洞也不会对AMU-Bot构成问题。AMU-Bot平台经济、坚固、易于使用,同时效率高。
该项目由德国联邦农业和食品局资助。AMU-Bot平台依赖于三个复杂模块的巧妙互动:履带式车辆、导航系统和机械手。博世负责导航和传感器系统,而KommTek开发了履带式驱动器。弗劳恩霍夫IPA设计了高度可调的机械手,包括旋转耙,并负责整体协调。

