
理县三菱叉车,现代叉车,斗山叉车


成都斗山叉车
斗山株式会社产业车辆在1968年推出韩国首款叉车产品以来,努力提供物流、交通运输、物品装卸事业需要的各种产品和服务。基于韩国、德国、中国的生产基地和美国、比利时、英国的销售法人等6个事业中心向全球100多个国家出口叉车,尤其在韩国国内市场以50%的市场占有率,奠定了稳固的领先地位。
斗山叉车为了提供产品的便利,舒适以及环保安静功能而采用了最新技术,但更重视产品的稳定性和耐久性。在此基础上为了满足客户需求设计生产的产品有:1.5吨级到25吨级的内燃平衡重式叉车;1吨级到5吨级的电动平衡重式叉车及仓储类车辆。斗山产业车辆在全球93个国家设有377家代理商,为全球客户服务。
此外,在国际展会上获得各种奖项,斗山叉车具备全球领先的研发能力和技术优势。所获奖项有:2000年获得授予一流产品的“World Best Award”;
2005年获得授予驾驶人员驾驶舒适度优秀产品的人体工学设计奖;2006年到2008年连续获得英国叉车协会授予的安全性优秀产品的“Safety Award”;
2011年斗山叉车推出的未来概念车荣获具有设计界“奥斯卡”之称的国际红点设计大奖;2012年荣获世界权威的设计奖之一的德国“iF Product Design Award”大奖;2014年获得授予革新性优秀产品的“Innovation Award”; 2015年荣获“PIN UP Design Award” 产业设计大奖。
斗山叉车于1998年进入中国,2011年12月1日成立斗山叉车(烟台)有限公司,是斗山集团工业车辆的全资子公司,斗山叉车(烟台)有限公司(简称DIVC)位于美丽的海滨城市烟台,占地面积38000平方米,年生产能力10,000台,主要生产内燃1~7吨,电动1~5吨及仓储类叉车,产品远销欧美,中亚,西亚,非洲,东南亚等世界各地。并通过ISO9001,14001,OHSAS 18001,美国UL认证,欧洲CE认证,德国EMC及荷兰ROAD认证。
“坚实社会承诺,共建美好中国”是斗山的公益理念,而履行企业社会责任是让利益相关方感动的前提和基础,斗山成为“CSR中国教育联盟”创始理事单位。斗山自进入中国以来,以“共建美好中国”为企业理念,热心致力于支持中国基础教育事业,赞助希望工程。自2001年起公司先后向“中国青少年发展基金会”捐款1025万人民币在中国各地建立了34所希望小学。2007年,一次性捐款2000万人民币,建成温暖工程(斗山)培训中心。在08年四川汶川大地震发生后,公司一次性捐款1022万人民币投入抗震救灾。2010年4月玉树地震,公司再献爱心,捐款408万人民币支援救灾。
理县三菱叉车,现代叉车,斗山叉车
叉车汇(www.chachehui.com),主要经营代理各品牌叉车、仓储设备;以提供高性价比的产品和极致服务体验为经营理念,为工厂和用户之间建立高效透明的供需渠道,目前已经成为国内领先的叉车供应链服务商。
服务全川
叉车汇(chachehui.com)可服务于成都、绵阳、德阳、南充、宜宾、自贡、乐山、泸州、达州、内江、遂宁、攀枝花、眉山、广安、资阳、广元、雅安、巴中、凉山、甘孜、阿坝等。
6RS 首席技术官CACIOPPO:系统导向机器人与集群机器人相比有哪些优势?

当团队研究仓库机器人时,经常出现的一个问题是了解系统导向型机器人和蜂群机器人之间的区别。这两种技术都是协作式移动机器人的类型,是与你的同事紧密合作的机器人。这些类型的系统试图通过减少不必要的行走和手工劳动,加快工作流程和减少培训时间,来提高与人工推车拣选相比的生产率。这两种方法都能提供比基于推车的拣选更多的好处,但也有很大的不同。
在比较和对比各种方法之前,让我们先定义一下每种机器人方法。
系统导向的机器人
最简单的情况是,一名员工遇到一个机器人,并被引导从一个拣选到另一个拣选。这可以分为传统区域或使用更先进的技术,如动态分区,但员工通常会使用同一个机器人执行多次连续拣选。该技术通常用于订单拣货、批次拣货、周期盘点和补货任务。为了便于参考,我们将在整篇文章中将此方法称为“定向采摘”。
集群机器人
集群机器人通常会前往特定的拣货地点并等待员工执行工作。工作完成后,群机器人会前往下一个拣选位置,员工会找到另一个有可用工作的群机器人。该技术通常用于订单拣选、周期盘点和补货任务。为了便于参考,我们将这种方法称为“swarming”。
什么时候最好使用定向拣选而不是集群?
这两种机器人方法之所以存在,是因为在不同的情况下,一种比另一种更有效。集群机器人在某些操作中可能很有效,特别是在小型、密集的拣选操作或具有宽通道托盘拣选的操作中。然而,随着操作变得更加复杂,定向采摘机器人的显着优势也越来越多。其中包括更好地扩展到大型运营、更高的工人生产力和更高密度的仓库。
操作扩展
在任何操作中,仓库的面积与地板上的拣货员数量之间通常存在直接关系。因此,随着仓库规模的扩大,您通常会看到更多的拣货员。然而,空间与拾取器和空间与机器人的关系在定向拾取和集群设计之间并不相同。
对于定向拣选机器人,机器人的数量由您操作中的拣选员数量表示。定向拣选机器人通常为每个拣选助理使用 1.5 个机器人,这可确保当机器人自动往返于仓库内的工作区域时,地板上的每个拣选员仍与不同的机器人一起工作。例如,一个 50k 平方英尺的仓库有 8 个拣货员可能需要 12 个机器人,而一个 500k 平方英尺的仓库有 24 个拣货员可能需要 36 个机器人。机器人通过优化的定向工作流程引导员工,并实时管理动态区域。这保证了指导工作伙伴始终以最有效的方式完成。

然而,使用集群机器人的场地设计会根据场地的面积而不是拣货员的数量来推荐机器人的数量。为什么是这样?
为了提高效率,集群机器人需要在拣选区域部署高密度的机器人。否则,机器人之间的行走时间会增加,效率会迅速下降。随着仓库的扩大,这个问题愈演愈烈。例如,一个 50 万平方英尺的仓库需要比 5 万平方英尺的仓库多 10 倍的集群机器人来保持相同的工人效率。
对于更大的操作,投资回报率通常不能证明如此庞大的集群机器人车队的成本是合理的。作为回应,蜂拥而至的机器人公司建议改变运营方式。一种方法是分配工作,其中挑选都在同一区域内,并将重点放在那里。但是,订单中的所有选择都包含位于相同几个过道内的 SKU 的可能性极小。因此,假设它们不是单机(通常最好分批挑选),一波从密密麻麻的机器人开始的拣货潮最终将分散在整个仓库中,导致拣货之间的时间缩短,相应地下降效率。蜂拥而至的机器人供应商试图通过多种方式解决这个问题,例如在仓库和区域拣货中挥动数据,但它们并没有从根本上解决密度问题。
另一种方法是扫过仓库(从左到右或其他模式挑选所有东西)。这可以稍微降低对机器人密度的要求,但它需要您的所有员工反复走遍整个仓库,从而导致时间效率低下和因疲劳导致的错误。要解决此问题,您可以将员工组织到区域中。然而,这只会让我们回到最初的问题:要么有足够的机器人来维持拣货面密度(以及由此产生的许多机器人的资本成本),要么仓库被划分为受不可预测工作负载困扰的区域——一些区域将非常忙碌而其他人很轻松——这会导致员工过度劳累和/或闲散。最终,
工人生产力
定向工作流程的最大优势之一是您可以跟踪并直接影响员工的工作效率。在消除“长途跋涉”之后,下一个最大的生产力损失点是拣选之间的时间。因此,选择之间的这段时间可以被密切监控并可能得到缓解。
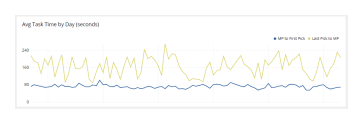
在上图中,蓝线代表员工从遇到机器人的地方步行到第一个选择,黄线是员工从最后一个选择走到新机器人,他们没有机器人。正如我们在上面的图表中看到的,当员工被留在他们自己的设备上时,他们往往难以预测并且需要更长的时间。在定向工作流中,几乎所有员工的运动都由机器人引导并保持在轨道上。
相比之下,使用集群方法,员工永远不会在任务之间被引导。机器人可以在其屏幕上指示员工可以在哪里找到他们的下一个任务,但就像上图中的黄线所示,员工总是要自己调整到该位置。由于被要求安排自己的工作节奏,蜂拥而至的机器人无法让无人监督的员工与挑选面孔保持互动。
仓库密度和过道尺寸
在仓库中,您通常会尝试最大限度地利用地面空间。定向拣选机器人在必要时通过使用单向过道来显着缩小过道。这并不奇怪,因为这是大多数购物车拣货操作利用地板密度的方式。本质上,通道只需要比定向采摘机器人稍宽。对于 6 River Systems 的 Chuck,所需的最小过道宽度为 42 英寸,适合大多数典型的过道布局。蜂拥而至的机器人供应商喜欢指出 Chuck 需要更宽的过道才能相互通过,这是事实,但这不是现实世界的问题。他们指出这一点是为了掩盖集群机器人的一个重大缺点——最小过道尺寸过大。
蜂拥而至的机器人,就其本质而言,必须始终能够相互超越,否则就会被卡住。蜂拥而至的机器人会前往挑选地点等待与员工互动。交互完成后,它会自主地前往下一个任务。如果两个机器人最终进入无法相互通过的过道,系统就会陷入僵局。该员工将在一个机器人上完成一项任务,然后该机器人将沿着过道向任一方向移动。然而,它在一个方向上的运动会被下一个机器人阻止,而在另一个方向上,拾取器会阻止它。这意味着最小通道尺寸必须更宽,以确保机器人可以相互通过。蜂拥而至的机器人供应商引用 60 英寸的最小尺寸,这比大多数高密度拣货通道要宽得多。

承载能力
“我们能不能少放点那个机器人?”从来没有仓库操作员问过。尽管机器人的大小与定向与集群方法没有内在联系,但实际上制造大型集群机器人要困难得多,因为它们必须能够在采摘过道中相互通过。由于这个事实,行业中的集群机器人往往体积较小,承载能力较小。定向采摘机器人往往具有更高的承载能力。因此,选择路径和工作效率更高。
例如,如果 6 个订单需要一个 SKU,则定向系统会将所有 6 个订单放在同一个机器人上,并且只访问其位置一次以检索所有 6 个项目。同时,集群系统中的这 6 个订单将被分配给 6 个不同的机器人,并且拣货员将在 6 次不同时间访问同一位置以拣选它们——增加了地板上的拥堵并增加了员工的步行时间。
综上所述
随着数量激增和劳动力越来越难找到,协作机器人绝对是现代履行中心的重要工具。定向拣选机器人和集群机器人都有用例。对于采用宽通道进行托盘拣选的小型场地,集群机器人可能非常有效。随着站点变大和拣货面密度增加,使用定向拣货机器人具有显着优势。

