
汉源叉车配件
汉源叉车配件
叉车配件的选购技巧,让你远离那些坑!

1、看叉车配件的零件号及规格是否合适
大部分的叉车配件都有一个特定的零件号和技术参数。如选购电气系统配件时,应注意检查与被换配件的电压、功率是否一致;选购叉车发动机传动皮带时,应注意型号和长度宽度。
2、看外包装的商标标识是否齐全
质优的叉车配件的外包装质量相对较好,且包装盒上字迹清晰,套印色彩鲜明。一些重要部件如发电机、起动机、液压泵等,还配有使用说明书、合格证和检验员章,以指导用户正确使用维护保养方法。因此在选购时应仔细认清,以防买了假冒伪劣的叉车配件。

3、看叉车配件的外形及尺寸有无变形
有些叉车配件因厂商制造、物流运输、存放不当,易产生变形。检查时,可将轴类零件沿玻璃板滚动一圈,看零件与玻璃板贴合处有无漏光来判断是否弯曲;选购叉车离合器从动盘钢片或叉车摩擦片时,可将钢片、摩擦片举在眼前观察其是否有翘曲;在选购叉车油封等密封件时,带骨架的油封端面应呈正圆形,能与平板玻璃贴合无翘曲;无骨架油封外缘应端正,用手握使其变形,松手后应能恢复原状。在选购各类衬垫时,也应注意用专业的量具检查配件的几何尺寸及形状。
4、看叉车配件的结合部位是否平整
叉车配件在搬运、存放过程中,或者会因为震动、颠簸,常会在结合部位产生毛刺、压痕、破损或出现裂纹,以影响叉车配件的安装使用。这一点在选购时或验货时应注意检查。
5、看叉车配件表面有无锈蚀
合格的配件表面,既有一定的精度又有铮亮的光洁度,越是重要的零配件,精度越高,且包装防锈防腐越严格。选购或验货时应注意检查,若发现配件有锈蚀斑点、霉变斑点、橡胶件龟裂、失去弹性,或轴颈表面有明显车刀纹路,应予以调换处理。

6、看叉车配件防护表层是否完好
大多数配件在出厂时都涂有防护层。如活塞销、轴瓦一般是用石蜡保护而叉车的活塞环、缸套表面涂防锈油并用包装纸包裹。叉车发动机配件的气门、活塞等浸防锈油后用密封的塑料袋封装。选购时若发现密封袋密封套破损、包装纸丢失,防锈油或石蜡流失,应予以退或换货。
7、看胶接配件有无松动
在检查由两个或两个以上零配件组合成的叉车配件,配件之间是通过压装、胶接或焊接而加工成型的,配件之间不允许有任何松动现象,如叉车油泵柱塞与调节臂是通过压装组合的;叉车离合器压盘与离合器片是铆接结合的,叉车摩擦片与钢片是铆接或胶接的;各种滤芯的滤芯骨架与过滤纸是胶接而成的;电气设备的电路电线头是焊接而成的。选购时若发现有松动,应予以调换。
8、看转动配件是否灵活
在选购叉车机油泵等转动部件总成时,用手转动泵轴,应感到灵活且无卡滞;选购滚针轴承时,一手支撑轴承内环,另一手打转外环,外环应能快速自如转动,然后逐渐停转。若转动部件转动不灵,说明内部锈蚀或外形已经发生变形,将会影响使用的,应予以退或换货。

9、看各总成配件有无缺件
质优的叉车总成部件如叉车变速箱系统的离合器或变速器总成,总成内所配备的零配件必须齐全完好,才能保证该总成能顺利装配和正常运行。一些总成部件上的个别小零件若漏装,将使总成部件无法工作甚至报废。
10、看叉车配件的装配记号是否清晰
为保证其它配合件的装配关系符合技术要求,在一些零件(如正时齿轮)表面刻有装配记号。若无记号或记号模糊无法辨认,将给装配工作带来很大困难,甚至直接装错。
11、看配合表面有无磨损
若配件的配合表面有磨损痕迹,或有涂抹油漆的配件拨开表面的油漆后发现旧漆,则多为废旧拆车件伪装,这时可直接要求退换。
12、看叉车配件的表面硬度是否达标
各配合件表面硬度都有规定的要求,在确定购买并与商家商妥后,可用钢锯条的断茬去试划,划时打滑无划痕的,说明硬度高;划后稍有浅痕的硬度较高;划后有明显痕迹的,说明硬度低,但需要注意的是在试划时不要损伤配件的工作面。


美大学受蚂蚁启发开发四足蜂群机器人穿越复杂地形
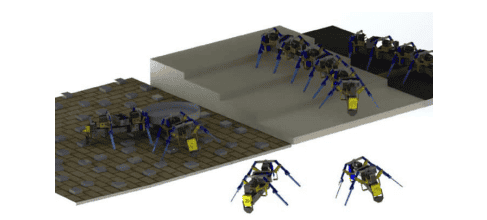
蚂蚁启发的四脚群机器人穿越复杂地形。资料来源:圣母大学
蚂蚁、蜜蜂和鸟类解决问题和克服障碍的集体行为是研究人员在空中和水下机器人技术中开发的。这种行为现在已经被复制到一个小型的3D打印多腿机器人中,有一天可能会在灾难现场寻找幸存者等应用中找到用途。
圣母大学(是一所私立天主教、研究型大学,位于美国印地安纳州南湾市东北部的圣母镇。)电气工程系助理教授Yasemin Ozkan-Aydin建造了这些小型多腿机器人,能够在具有挑战性的环境中进行操纵,并集体完成任务,模仿自然界的同类。这种四条腿的机器人长度为15至20厘米,或大约6至8英寸,配备了锂聚合物电池、微控制器和三个传感器–前面的一个光传感器和前后的两个磁性触摸传感器。
它的四条灵活的腿减少了对额外传感器和部件的需求,并使机器人具有一定程度的机器智能,这在与粗糙或不平坦的地形互动时很有帮助。Ozkan-Aydin说:“你不需要额外的传感器来检测障碍物,因为腿部的灵活性有助于机器人直接越过它们。”它们可以测试路径中的空隙,用它们的身体搭建一座桥梁;单独移动物体;或者在不同类型的环境中连接起来集体移动物体,与蚂蚁并无二致。”
这些机器人使用它们的磁性触摸传感器来确定它们相对于彼此的方向,并将它们的身体连成一串。这样,它们可以完成一些任务,如穿越缝隙、爬楼梯和在不平坦的地形上运输物体,甚至可以一起工作,搬运单个机器人无法处理的过大或过重的物体。
Ozkan-Aydin在2020年初开始制造这些机器人,并继续在家里或在她的院子里改进和测试它们。四条腿的机器人在草地、地膜、树叶和橡子上进行测试。它们还在长毛地毯上进行测试,矩形木块被粘在刨花板上,作为粗糙的地形。
她预计,这项研究的结果将为设计低成本的腿部群提供信息,这些腿部群可以适应不可预见的情况,并执行现实世界的合作任务,如搜索和救援行动、集体物体运输、空间探索和环境监测。Ozkan-Aydin现在正致力于改善该系统的控制、传感和动力能力,这对现实世界的运动和解决问题至关重要。她计划用这个系统来探索蚂蚁和白蚁等昆虫的集体动力学。
她说:“对于功能性蜂群系统,电池技术需要改进。我们需要能够提供更多电力的小型电池,最好能持续10小时以上。否则,在现实世界中使用这种类型的系统是不可持续的。” 其他限制包括需要更多的传感器和更强大的电机–同时保持机器人的体积小。”

