
射洪叉车配件
射洪叉车配件
叉车配件的选购技巧,让你远离那些坑!

1、看叉车配件的零件号及规格是否合适
大部分的叉车配件都有一个特定的零件号和技术参数。如选购电气系统配件时,应注意检查与被换配件的电压、功率是否一致;选购叉车发动机传动皮带时,应注意型号和长度宽度。
2、看外包装的商标标识是否齐全
质优的叉车配件的外包装质量相对较好,且包装盒上字迹清晰,套印色彩鲜明。一些重要部件如发电机、起动机、液压泵等,还配有使用说明书、合格证和检验员章,以指导用户正确使用维护保养方法。因此在选购时应仔细认清,以防买了假冒伪劣的叉车配件。

3、看叉车配件的外形及尺寸有无变形
有些叉车配件因厂商制造、物流运输、存放不当,易产生变形。检查时,可将轴类零件沿玻璃板滚动一圈,看零件与玻璃板贴合处有无漏光来判断是否弯曲;选购叉车离合器从动盘钢片或叉车摩擦片时,可将钢片、摩擦片举在眼前观察其是否有翘曲;在选购叉车油封等密封件时,带骨架的油封端面应呈正圆形,能与平板玻璃贴合无翘曲;无骨架油封外缘应端正,用手握使其变形,松手后应能恢复原状。在选购各类衬垫时,也应注意用专业的量具检查配件的几何尺寸及形状。
4、看叉车配件的结合部位是否平整
叉车配件在搬运、存放过程中,或者会因为震动、颠簸,常会在结合部位产生毛刺、压痕、破损或出现裂纹,以影响叉车配件的安装使用。这一点在选购时或验货时应注意检查。
5、看叉车配件表面有无锈蚀
合格的配件表面,既有一定的精度又有铮亮的光洁度,越是重要的零配件,精度越高,且包装防锈防腐越严格。选购或验货时应注意检查,若发现配件有锈蚀斑点、霉变斑点、橡胶件龟裂、失去弹性,或轴颈表面有明显车刀纹路,应予以调换处理。

6、看叉车配件防护表层是否完好
大多数配件在出厂时都涂有防护层。如活塞销、轴瓦一般是用石蜡保护而叉车的活塞环、缸套表面涂防锈油并用包装纸包裹。叉车发动机配件的气门、活塞等浸防锈油后用密封的塑料袋封装。选购时若发现密封袋密封套破损、包装纸丢失,防锈油或石蜡流失,应予以退或换货。
7、看胶接配件有无松动
在检查由两个或两个以上零配件组合成的叉车配件,配件之间是通过压装、胶接或焊接而加工成型的,配件之间不允许有任何松动现象,如叉车油泵柱塞与调节臂是通过压装组合的;叉车离合器压盘与离合器片是铆接结合的,叉车摩擦片与钢片是铆接或胶接的;各种滤芯的滤芯骨架与过滤纸是胶接而成的;电气设备的电路电线头是焊接而成的。选购时若发现有松动,应予以调换。
8、看转动配件是否灵活
在选购叉车机油泵等转动部件总成时,用手转动泵轴,应感到灵活且无卡滞;选购滚针轴承时,一手支撑轴承内环,另一手打转外环,外环应能快速自如转动,然后逐渐停转。若转动部件转动不灵,说明内部锈蚀或外形已经发生变形,将会影响使用的,应予以退或换货。

9、看各总成配件有无缺件
质优的叉车总成部件如叉车变速箱系统的离合器或变速器总成,总成内所配备的零配件必须齐全完好,才能保证该总成能顺利装配和正常运行。一些总成部件上的个别小零件若漏装,将使总成部件无法工作甚至报废。
10、看叉车配件的装配记号是否清晰
为保证其它配合件的装配关系符合技术要求,在一些零件(如正时齿轮)表面刻有装配记号。若无记号或记号模糊无法辨认,将给装配工作带来很大困难,甚至直接装错。
11、看配合表面有无磨损
若配件的配合表面有磨损痕迹,或有涂抹油漆的配件拨开表面的油漆后发现旧漆,则多为废旧拆车件伪装,这时可直接要求退换。
12、看叉车配件的表面硬度是否达标
各配合件表面硬度都有规定的要求,在确定购买并与商家商妥后,可用钢锯条的断茬去试划,划时打滑无划痕的,说明硬度高;划后稍有浅痕的硬度较高;划后有明显痕迹的,说明硬度低,但需要注意的是在试划时不要损伤配件的工作面。


Open Robotics 开发具有 Blue Origin 的 Space ROS,NASA
开放机器人公司正在与杰夫-贝佐斯创办的亚轨道航天公司蓝色起源和美国国家航空航天局合作开发太空ROS。空间ROS是ROS 2的一个版本,旨在满足航空航天软件在用于任务之前必须满足的验证和确认要求。
机器人操作系统(ROS)被用于太空活动已经超过十年了。它的使用始于2012年的ROSCon,当时美国宇航局展示了其在Robonaut 2(R2)人形机器人中的ROS使用。NASA将R2的软件换成了ROS,并使用Gazebo,Open Robotics的3D机器人模拟器,建立了一个机器人和国际空间站(ISS)的模型。
到2014年,R2和其基于ROS的软件已经在国际空间站上运行。这是ROS在太空中的首次确认使用。
当美国宇航局开始研究其下一个机器人–Robonaut 5(R5),也叫Valkyrie,它从一开始就使用ROS。它还继续使用Gazebo进行机器人的测试和开发。R5后来参加了DARPA机器人挑战赛的竞争。
2015年,美国宇航局举办了第一届太空机器人挑战赛(SRC),这是一个虚拟的比赛,旨在为太空探索任务推进机器人软件和自主能力。在SRC中,各团队面临的挑战是模拟R5做栖息地准备任务。比赛的获胜者,协调机器人公司,能够在一天内将他的代码从模拟转移到真正的机器人硬件。
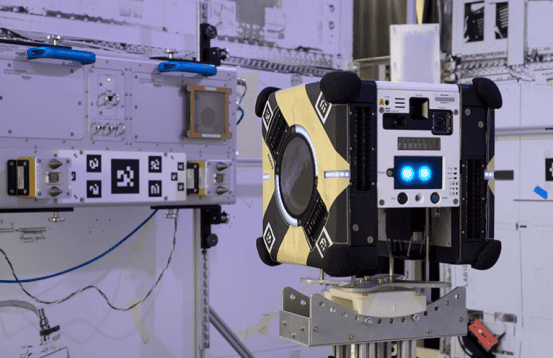
国际空间站上的Astrobee。| 资料来源:NASA。美国国家航空航天局
Open Robotics公司的联合创始人兼首席执行官Brian Gerkey将在5月10日至11日在波士顿举行的机器人峰会和博览会上作主题发言。他的演讲名为 “机器人技术需要一个Babelfish。他将讨论各公司如何解决互操作性问题,以及供应商、终端用户和集成商有哪些选择。与会者将了解Open-MF(机器人中间件框架)的历史,多供应商机器人互操作性的最佳实践,以及未来互操作性的趋势。
NASA在其他太空机器人中使用ROS,如Astrobee,SPHERES的自由飞行继任者。多个Astrobees正在国际空间站内工作。
目前,美国宇航局和开放机器人公司正在进行VIPER计划。VIPER的目标是在2023年将一个移动机器人送到月球南极。ROS 2将进入漫游车的控制回路。
蓝色起源公司最近收购了Honeybee机器人公司,金额未透露。该交易预计将在2月中旬完成,Honeybee机器人公司将成为蓝色起源的全资子公司。

