
南溪中力叉车


杭州中力搬运设备有限公司为浙江中力机械股份有限公司下属全资子公司,浙江中力机械股份有限公司(EP EQUIPMENT)是一家是靠创新产品驱动,推动行业变革,旨在打造工业物流4.0的全球化科技企业,专业从事电动仓储设备、智能搬运机器人及叉车开发、制造及服务。
2012年在全球推出小型电动搬运设备—中力小金刚系列,荣获国际设计大奖“德国红点奖”和“IF设计大奖”,自此改变了行业产品史,实现了从手动搬运到电动搬运的裂变,中力也因此从杭州发展到拥有浙江安吉、江苏靖江、杭州富阳、湖北襄阳等多个生产基地的国际化企业,厂区面积达1000亩。自2013年起,电动仓储设备车辆产销量连续9年位居国内同行业第一名,锂电池叉车产销连续3年排名第一。(数据来源:CITA2013年~2021年年报发布;CITA2019~2021年年报发布)
中力将以“解放人类劳动力”为使命,在实现从手动搬运到电动搬运的基础上,正全力推动从柴油叉车到锂电叉车的绿色革命,基于“搬马机器人”为主体,创造性推出五大智能搬运新模式,打造4.0时代下的工业物流4.67,努力实现绿色搬运、智能搬运和数字搬运。
南溪中力叉车
叉车汇(www.chachehui.com),主要经营代理各品牌叉车、仓储设备;以提供高性价比的产品和极致服务体验为经营理念,为工厂和用户之间建立高效透明的供需渠道,目前已经成为国内领先的叉车供应链服务商。
服务全川
叉车汇(chachehui.com)可服务于成都、绵阳、德阳、南充、宜宾、自贡、乐山、泸州、达州、内江、遂宁、攀枝花、眉山、广安、资阳、广元、雅安、巴中、凉山、甘孜、阿坝等。
俄罗斯科学家发明了一种可以改善机器人在不平坦地形中导航的新系统
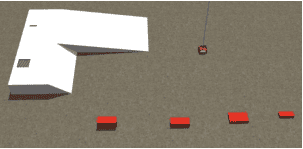
俄罗斯研究人员用来运行模拟实验的环境
随着移动机器人变得更加先进,它们也变得更容易部署在广泛的现实世界环境中。使它们能够大规模实施的因素之一是它们在不同类型环境中自主移动的能力。
到目前为止,许多移动机器人在导航简单环境方面取得了可喜的成果,特别是那些有光滑地板或地形的环境。然而,在现实世界中,许多环境,包括工业厂房、一些道路和自然环境,都有不平整的地形,地面上有洞或颠簸,有杂物和其他障碍。
俄罗斯科学院和莫斯科国家研究大学高等经济学院的研究人员最近开发了一个新的导航系统,可以提高移动机器人在粗糙表面上移动的能力,同时还能避开不同类型的障碍物。在arXiv上预先发表的一篇论文中介绍的这个系统,可以帮助促进机器人在更复杂和杂乱的不平坦地形环境中的部署。
Stepan Dergachev、Kirill Muravyev和Konstantin Yakovlev在他们的论文中写道:”在不平整的地形中安全导航是机器人研究中的一个重要问题。”我们提出了一个2.5D导航系统,它包括建立高程地图、路径规划和带有避障功能的局部路径跟踪。对于局部路径跟踪,我们使用模型预测路径积分(MPPI)控制方法。”
Dergachev和他的同事提出的机器人导航系统是基于MPPI,这是乔治亚理工学院的研究人员在2016年推出的一种优化和纠正非线性路径的算法。为了研究的目的,该团队对这一算法进行了调整,使其适用于使用2.5D高程地图,在地形不平的环境中优化路径。
Dergachev和他的同事在他们的论文中解释道:“我们使用局部高程地图作为MPPI算法的输入。MPPI由该高程图计算的地形可穿越性值来指导。这些可穿越性值是由斜坡陡度、表面粗糙度和其他参数计算出来的。”
Dergachev和他的同事在模拟环境的一系列测试中评估了他们的导航系统,使用了三种不同的高程地图。在这些测试中,机器人必须到达一个特定的位置,同时克服或绕过途中的三个不同的障碍,即一个截断的锥体、一个斜坡和一些坑。
这些测试中使用的模拟环境是用Gazebo模拟器创建的,其特点是有不同的障碍和不平整的地形类型。研究人员使用一个四轮差动驱动机器人的模型测试了他们的系统在这些环境中的有效性。
Dergachev和他的同事们发现,他们的系统在模拟中表现得非常好,机器人几乎100%地成功绕过了障碍物并在不平坦的地形上航行。然而,为了证实其潜力,该团队最终还需要在现实世界中使用一个实体机器人对其进行测试。
如果该系统在真实环境中也表现良好,它最终可以被调整并用于进一步的研究。最终,它可以因此促进移动机器人的发展,使其能够更好地在地形不平的环境中导航。
“在未来,我们计划通过使用CUDA/OpenCL工具包进行并行计算,创建一个更有效的MPPI算法的实现。”研究人员在他们的论文中总结道:”未来工作的另一个领域将是提高MPPI的鲁棒性,并使其适应更大类别的动态系统”。

