
宜宾叉车维修
宜宾叉车维修
引擎部分
一.启动机能带动发动机运转,但无发动征兆.
引起发动机产生这一现象一般是燃料系不良所致,它分低压油路和高压油路,检查时应先确定故障出自哪部分,首先将喷油泵放气,螺栓松开扳动手油泵看出油情况,若不出油或流出泡沫状柴油说明是低压油路否则就是高压油路故障.


(1)低压油路故障
1. 油箱无油:处理方法加油
2. 油管堵塞,处理方法:清理疏通
3. 输油泵滤网堵塞,处理方法:清理
4. 油管老化漏气,更换
5. 柴油滤清器太脏,更换
6. 输油泵活塞损坏,更换
(2)高压油路故障:1.喷油泵不工作,校正 2.喷油器不工作 校正或更换
(二)喷油时间过早
现象
1. 汽缸内发生有节奏而清脆的“嘎嘎”金属敲击声
2. 发动机过热、无力、冒黑烟
3. 怠速不良
4. 不易启动
处理方法
将固定盘的固定螺钉松开,慢慢延迟喷油时间,直至喷油情况好转为止,也可卸下第一缸高压管转动曲轴注意看喷油泵上出油阀压紧座中的油面,在油面刚刚有微量波动的瞬间,从飞轮上的喷油定时刻度线和飞轮壳上的记号是否重合,看提前角是否符合规定,若不符合规定,再进行调整.
(三)喷油时间过迟
现象
1. 汽缸发生低沉而不清晰的敲击声.
2. 发动机转速不能随油门加大而提高
3. 发动机过热:无力、冒白烟
检查连接盘固定螺钉是否松动移位,可将固定盘的固定螺钉松开,慢慢提前喷油时间,直至喷油情况好转为止,如调整无效,应检查喷油泵柱塞挺杆上的定时调整螺钉是否失调,若失调重新调整.
(四)发动机无力
故障原因
1.低压油路供油不足,油箱通气孔堵塞,油管堵塞,破裂接头松动及垫片密封不严。处理方法:找出故障对油路疏通,更换
2.空气滤清器堵塞而进气不畅,处理方法,更换或清洁滤清器
3.柴油滤清器堵塞,处理方法:更换
4.输油泵供油不足,处理方法:修复或更换
5.燃料系中有空气或水分,处理方法:排除空气或水分
6.喷油时间过早或过迟,处理方法:调整
7.排气管或消音器堵塞而排气不畅,处理方法:清洁
8.喷油泵喷油量不足,处理方法:浇油泵
9.个别喷油器雾化不良,处理方法:找出是哪里缸故障更换或修配喷油器
10.发动机温度过高,处理检查冷却系统找出故障并排除
11.油门拉线调整不当,调整
12.机械方面因素造成汽缸压力过低。属于机械方面因素有:配气机构气门关闭不严和活塞、活塞环、汽缸套磨损严重等,调整气门间隙,重研气门或更换活塞、活塞环及搪、磨气缸套等
(五)运转中突然熄火
现象
1.发动机运转中突然熄火
2.熄火前无异常症状
故障原因及处理方法:
1.油箱无油:处理方法:加油
2.柴油中混有水或空气,处理方法:排除水或空气
3.油管堵塞或破裂,处理方法:疏通或更换油管
4.燃油滤清器堵塞,处理方法:更换
5.油管接头松动进气,处理方法:挤紧接头排光油路中的空气
6.输油泵不供油,处理方法:修理或更换输油泵

变速器系统部分
液力变速箱部分
(一)液力变速箱技术参数
1.传动功率40KW
2.输入转速 1800-2400N/min
3.转向(从输入端看) 顺时针方向
4.离合活塞行程,1.2-1.7MM
5.工作油,20#汽轮机油(或6#或8#液力传动油)
6.工作油温 70-95摄氏度
7.最高油温,不超过110摄氏度
(二)效率下降
(1)变矩器部分
1.发动机转速下降,处理方法:提高发动机转速
2.油中存在气泡,检查管路密封性及液力油是否变质
3.油温升得过高或过低
(2)变速箱部分
1.磨察片卡死或磨损,检查磨察片是否有胶,不均接触,翘曲
2.密封环或O形圈磨拓,检查密封环和槽宽是否磨拓或损伤
(三)油温过高
(1)变矩器部分
1.变矩器长时间处在低速比区域工作,变矩器效率很低,或处在失速状态时间过长,应改变这种工作状况和注意避免上述工作状况。
2.在高转速比时,单向离合器卡死,失去控制,应检查排除。
3.加油量太少,或系统中产生气泡,应增加油量调整排阀压力。
4油的质量不合格,应更换新油。
(2)变速箱部分。
1.离合器障碍,检查摩擦片是否打滑。
2轴承损坏,检查配合面是否损坏。
(四)变速箱不工作
1.检查操纵阀是否有弹簧卡死及断裂.
2.检查主油压是否正常,如不正常检查三联泵是否磨损过大或损坏.
3.如主油压正常检查离合器油压如不正常检查密封环或O型圈是否磨损或损坏.检查离合器及离合器活塞环是否损坏.
4.检查变矩器油压是否正常如不正常检查变矩器.

机械变速箱部分
(一)离合器系统故障
离合器技术状况不良的主要表现是离合器打滑具体表现
1.车速下降车速不能随发动机转速增高而增大.
2.起步困难和不能行使.
3.摩擦机件温度升高,摩擦系数下降.
4.长时间打滑引起的高温可使压盘烧伤和离合器片烧焦,检修时调整踏板自由行程和分离杠杆高度,如还不能解除还要看离合器结合时是否发抖,分离不彻底及结合、分离或运转中发响等,当发现这些现象时,应进一步检查调整或修理更换相关配件.
(二)变速器挂档困难
1.离合器分离不彻底
2.检查结合套和结合齿圈的结合端面损坏、齿廊变形.
3.同步齿环与锥盘(齿轮)的摩擦面是否磨损.
4.定位弹簧弹力减弱结合套不能以此驱动定位销(调速键)使同步齿环.与堆盘(齿轮)紧密接触产生同步作用.
5.拨叉弯曲或扭曲,使接合套(离合齿套)和接合齿的轴线不同心.
6.拨叉轴弯曲或锈蚀发卡.
以上情况都会引起挂档困难甚至不能挂档应细心检查出故障位置修复或更换相关配件.
(三)变速器跳档
跳档就是当负荷增大或车辆剧烈震动时,变速杆由所挂的档位自动跳回空挡位置造成这种情况的主要原因.
1.齿轮和接合齿磨损过大,更换齿轮和接合齿.
2.自锁装置弹簧过软或折断、更换弹簧.
3.同步接合套及同步齿环及齿轮之间磨损过大,更换相关配件.
4.拨叉弯曲或磨损,更换或校正拨叉.
5.自锁装置的钢环不能完全卡在拨叉轴的凹槽内,检查连接销和销孔是否松旷及操纵杆与拨叉球头和球窝等是否松旷,如松旷应更新或修复。

刹车系统
怎样正确地调整刹车.
第一步:完全松开手刹车把手刹车调整螺杆松开.
第二步:把刹车总泵顶杆完全松开时停止两边一定要调整均匀.
最后:调整好手刹车及总泵顶杆,刹车踏板自由行程一定要保持在10-15MM之间.
怎样判断和排除制动单边故障
1.左右车轮刹车片与制动鼓间障不一致.调整
2.个别车轮刹车片有油污或磨损过大或两个车轮刹车片材料不同,修复或更换刹车片.
3.一边车轮刹车片与制动鼓接触不良或回位弹簧弹力与另一边相差太大,修复或更换相关配件.
4.两边车轮气压或车轮轮毂轴承紧度不一致,调整.
驱动桥
怎样判断驱动桥响声?
1.如驱动桥发出杂乱而连续的噪音并且噪音随转速增高而增大,滑行时减少或消失,一般是轴承磨损后产生的响声,应检修或更换轴承重新调整
2.如行使中驱动板发出有节奏的金属撞击声,特别是车速急剧变化或起步时响声十分明显,大多是盆型齿轮齿合间隙太大所致,应调整齿合间隙.
3.行使中发现有连续不断地“嗡嗡”声且驱动桥发热现象,可能是轴承过紧或齿隙过小,也可能是润滑不良,应停车检查和添加润滑油后如还有上述现象应检查调整轴承紧度或齿轮间隙.
4.车辆在行使中如突然发出“啃”的一声或“嘎啦”响一般是盆型齿轮组打坏或轴承散架,应立即检修.
液压系统
一、无起升
1.检查油压泵浦是否有足够的油量油压输出如没有检查油箱的液压油是否足够,处理方法:添加液压油,检修油压泵浦及进油管路.
2.检查排阀是否严重内漏,更换
3.检查油缸是否内漏损坏,更换油封或油缸.
二、油缸起升到一半时无法再起升.
出现此现象有以下几种情况:
1.油箱中液压油有气泡,应检查更换液压油滤芯.
2.油箱中液压油无气泡,应检查更换油箱至油压泵浦的油管.
3.油缸内漏,更换油封.
三、方向重
1.油压太小,调整液压油流量增大压力.
2.转向油缸内漏,更换油封.
3.方向机内磨损严重或损坏.更换方向机.
4.方向盘系统内轴承损坏,更换轴承.
内燃机电器系统
一、叉车电路的特点
1.低压 2.直流 3.单线制 4.负极搭铁 5.并联
二、发电机不发电的简单检修方法:
1.检查保险丝有无损坏,更换
2.检查电子调节器有无正常电压输入输出(490B),如无输入电压检查点火开关至电子调节器线路,如无输出更换电子调节器.
3.检查发电机碳刷及二极管是否损坏,更换
三、喇叭不响
1.检查电源至喇叭开关至喇叭电源线有无断路.,修复
2.检查喇叭开关是否有烧坏或接触不良现象,修复
3.在电源上直接试喇叭是否损坏,更换
四、无法预热
1.检查预热继电器及计时器是否损坏,更换
2.检查预热塞是否烧坏,更换
3.检查预热线路是否断路或短路,修复
五、灯光系统故障的检修方法:
1.检查灯泡是否损坏,更换
2.检查开关是否烧坏,更换或修复
3.检查保险丝及线路是否短路,更换或修复.
用于接近人类任务的安全而强大的机器人技术

流线型机器人手臂的外观设计研究,在靠近人类的地方使用时具有很高的接受潜力。资料来源:L. Boxberger/Fraunhofer IWU
机器人修剪草坪是社会已经接受的一种机器人协助形式。但目前在其他任务中,特别是那些涉及到与人类近距离接触的任务,如家务和护理,机器人协助的概念还很少。弗劳恩霍夫机床和成型技术研究所IWU在机器人中使用创新的可切换刚度,将所需的强度和必要的安全性结合起来。在2022年3月16日的汉诺威工业博览会预展和2022年5月30日至6月2日的汉诺威工业博览会上,研究人员将展示一种机器人手臂,可以促进人们在其直接周围的支持。
晚上,当机器人在厨房打扫卫生时,父母有时间舒适地坐在沙发上给孩子读书,怎么样?或者护理人员再次有时间专注于他们工作中的人性和情感方面,而由机器人来处理艰苦、单调的部分?到目前为止,像这样的场景一直是科幻故事中的想法。毕竟,机器人主要是以僵硬的机器人系统的形式应用于工业领域,这些系统被精简为力量和精度,需要非常复杂的安全计划,以确保没有工人被置于危险之中。
人形外观?不完全是
弗劳恩霍夫IWU的研究人员为自己设定的目标是,在涉及接近人类的领域推动机器人技术的发展。弗劳恩霍夫IWU的人类机器人技术领域的课题负责人Linda Weisheit说:”用于接近人类的机器人与用于工业的机器人产生了非常不同的要求,在工业中,工人可以以特定的方式接受培训。如果机器人要在日常生活中使用,首先它们需要是安全的,其次,它们必须有一个合适的外观,以增加接受度。虽然人形机器人在日本很受欢迎,但欧洲人往往认为与人类的相似性令人不安。因此,研究人员在设计方面保持着稳定的关注。”
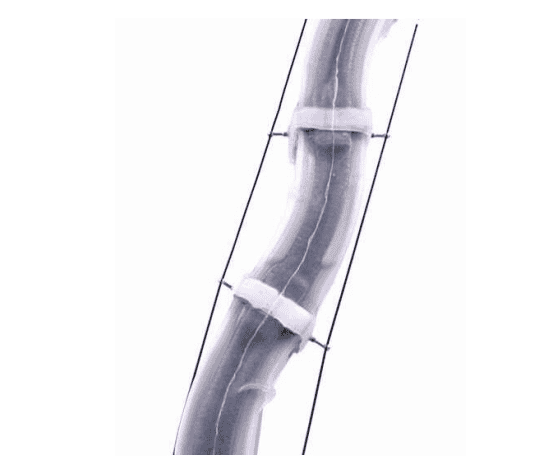
弗劳恩霍夫IWU的研究现状:机器人手臂由三个部分组成,具有可切换的硬度和肌腱,可执行一系列不同的运动。资料来源:弗劳恩霍夫IWU
可切换的刚度提供了力量和安全
Weisheit解释说:”在安全方面,软体机器人技术提供了一个良好的基础。它利用柔软的材料,不会造成伤害。另一方面,这些机器人不能执行相当多的任务–即使是一整杯咖啡,对软体机器人手臂来说也太重了。因此,我们正在努力开发具有可切换硬度的新结构–这意味着它们可以在刚性和柔软之间切换这种可切换硬度的原理类似于咖啡包装中使用的原理。当真空包装时,它是坚硬和牢固的,但如果空气进入,它就会变得漂亮和柔软。为了进一步提高结构刚度,特别是在拉伸应变下,研究小组正在将其与置于彼此之上的薄膜相结合。这种组合的结果是,该系统可以承受拉伸应变,同时也能抵抗压缩。使用这类具有可切换硬度的结构部件,使得设计新的运动概念和新的安全系统成为可能。这对我们的日常生活可能意味着什么,最好用装满咖啡的杯子这样一个例子来解释。如果机器人需要把它拿起来,它就把它的软臂变得更硬一些,这样它就能施加必要的力。在固体状态下,它的硬度是软的时候的300倍;换句话说,它的开关系数是300。然而,如果碰撞迫在眉睫–例如,如果人靠得太近–机械助手不会简单地切换回其软态。这将导致它把杯子掉到地上,留下一滩滚烫的咖啡,可能会对小孩子造成危险。相反,它被设计为执行一个规避动作。换句话说。就像人一样,它在拿着杯子的同时摆脱障碍物的束缚。”
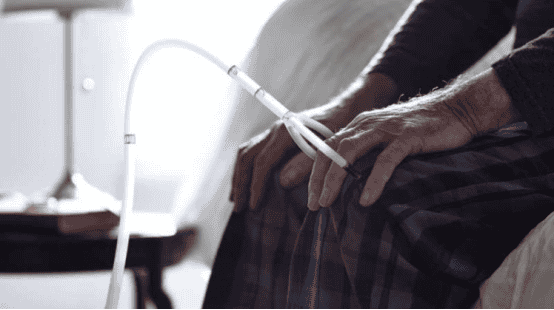
安全和强大的机器人结构的部署方案的愿景。信用: L. Boxberger/Fraunhofer IWU
Weisheit解释说:”研究人员已经向整个机器人系统迈出了第一步,并对整个系统的外观提供了一个初步设想。他们已经开发了相关的结构部件,将它们与传感器和执行器以及手势控制结合起来,并制作了一个肌腱驱动的机器人手臂,它由三个可切换的部分组成,并通过手势控制来执行平面运动。我们希望尽早与用户开始对话,并找出他们的具体需求,这将使研究人员能够根据用户需求继续开发。”

