
汶川龙工叉车
龙工叉车
龙工(上海)叉车有限公司是中国龙工控股有限公司的全资子公司,自上市以来龙工叉车以其优良的品质和出众的性价比迅速占据了市场,营销网络和产品用户已遍布全国,现有各级代理商、服务商千余家。 公司现有上海、江西两大生产基地,并拥有多条蓄电池叉车、内燃中小吨位叉车、内燃大吨位叉车总装线,及结构件涂装线、平衡重涂装线、零部件喷粉线等涂装线,结构件与零部件全部采用先进的高效数控切割机、激光切割机、大型数控立式加工中心、数控五面体加工中心、焊接机器人等先进设备加工制造,是国内外同行中设备较精良的企业。公司现有内燃叉车、蓄电池叉车、仓储叉车、港口叉车等四大系列两百多个品种,产品技术含量高,性能稳定,性价比高。公司先后通过ISO9001质量管理体系认证及CE、GOST等产品认证。由美国工业杂志《现代物流搬运》(Modern Mater Handling,MMH)统计,推出的“2019年全球叉车20强叉车供应商排行榜”,龙工叉车综合排名第13位。国内市场占有率连续几年同行业排名前三位。


龙工叉车将始终坚持“销售代理制”这“一大原则”,不断强化“质量、服务、性价比”这“三大优势”,构建起遍布全国的龙工叉车营销服务网络,与广大代理商进一步加强合作,共同打造龙工叉车“一小时销售·服务工作圈”,龙工叉车依照龙工董事局制定的发展纲要,专心专注做好叉车,力争早日成为叉车行业的领军企业;确保年两位数复合增长的总体目标和工作要求,全面实施“国际化定位、跨越化发展”的战略,为繁荣国内外物流市场和推动叉车行业的进步与发展提供强劲的动力。
汶川龙工叉车
叉车汇(www.chachehui.com),主要经营代理各品牌叉车、仓储设备;以提供高性价比的产品和极致服务体验为经营理念,为工厂和用户之间建立高效透明的供需渠道,目前已经成为国内领先的叉车供应链服务商。
服务全川
叉车汇(chachehui.com)可服务于成都、绵阳、德阳、南充、宜宾、自贡、乐山、泸州、达州、内江、遂宁、攀枝花、眉山、广安、资阳、广元、雅安、巴中、凉山、甘孜、阿坝等。
Foxglove 推出 beta 3D 面板
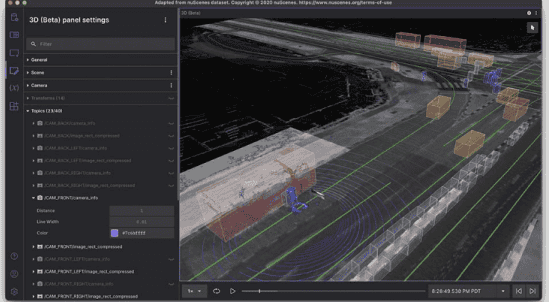

Foxglove的测试版3D面板在其Foxglove工作室内。|来源:Foxglove
Foxglove宣布,它正在为其开发平台Foxglove Studio推出新的测试版3D面板。该面板具有更多的性能和响应功能,比该工作室以前的3D面板更容易使用。
新面板渲染了一系列姿势、点云和其他可视化市场,以创建一个机器人在现实世界中遇到的画面。知道你的机器人看到了什么,对机器人开发至关重要。
新面板的主题树和设置编辑器已被内置到工作室的侧边栏中,使用户能够最大限度地利用空间来处理他们的三维数据。用户可以通过选择工作室侧边栏上的3D(Beta)选项进入该面板。
Foxglove Studio是一个开源的可视化和调试平台。该工作室带有ROS 2支持和一个扩展API。
该公司开始时是Webviz的一个分支,这是一个在Cruise开发的基于浏览器的可视化工具。该公司在2019年开放了该工具的源代码。Foxglove的创始人Adrian Macneil和Roman Shtylman在Cruise工作期间注意到,用于机器人技术的现成工具非常少,于是在2021年创办了Foxglove。
对于许多机器人公司来说,所有的工具都需要在内部制作,这可能是昂贵和耗时的。该公司的成立是为了填补这一空白,并创造出能够帮助加速机器人技术发展的机器人开发工具。
该公司的第二个产品,Foxglove数据平台,是一个用于机器人技术的数据管理解决方案。该产品旨在帮助机器人专家更好地管理机器人技术所带来的大量数据。
Foxglove的创始人看到,这个行业缺乏能够处理机器人技术所需的大量数据的解决方案。一些机器人专家曾诉诸于简单地传递外部硬盘进行协作。
Foxglove凭借Foxglove工作室和数据平台获得了2022年RBR50机器人创新奖。
该公司的联合创始人兼首席执行官Adrian Macneil最近做客The Robot Report Podcast。Macneil讨论了该公司从自动驾驶公司Cruise分拆出来的情况,其解决方案与RViz有什么不同,机器人开发的挑战以及运营其创业公司的关键。Foxglove最近筹集了370万美元的种子资金。
关于美国Foxglove公司进入企业商铺
Foxglove的成立旨在通过为机器人行业带来高质量的工具来改善机器人团队的开发体验。我们的使命是缩短用户的上市时间,并加速机器人革命。
我们的创始团队在Cruise工作了多年,在那里我们亲身体验了自动驾驶汽车领域对高质量基础设施和工具的需求,并为可视化,数据管理,模拟等构建了行业领先的解决方案。
Foxglove Studio最初是Webviz的一个分支,Webviz是Cruise开发的基于浏览器的可视化工具。虽然基于浏览器的工具在Cruise环境中具有优势,但我们相信,提供本机应用程序还使我们能够创建更强大,可扩展和高性能的工具,可以轻松连接到实时运行的机器人或各种其他数据源。
Foxglove Studio与ROS配合得很好,但我们也认为开发人员应该自由选择他们想要的任何框架,或者从头开始构建一个框架。我们喜欢听到人们在非ROS环境中使用Foxglove。

